





四足歩行ロボットを活用した山岳トンネル工事の安全性向上実験
四足歩行ロボットを利用した安全なトンネル工事の新時代
近年、トンネル工事において作業員の安全確保がますます重要な課題となっています。株式会社鴻池組と株式会社ポケット・クエリーズが2026年2月に実施した四足歩行ロボットを用いた観察実験は、その解決策の一端を示しています。この技術は、危険エリアにおける自律探査とデータ収集の可能性を拓くものであり、今後の工事現場での安全性向上に大きな影響を与えることでしょう。
トンネル工事と危険性
山岳トンネルの工事現場では、掘削面の観察が欠かせません。しかし、落石や崩落、可燃性ガスの出現など様々な危険が潜んでおり、作業員は常に危険に晒されています。そのため、鴻池組とポケット・クエリーズは、これらの危険を回避しつつ、正確な観察を実現するために新たなシステムの開発に取り組みました。
四足歩行ロボットの自律歩行プロセス
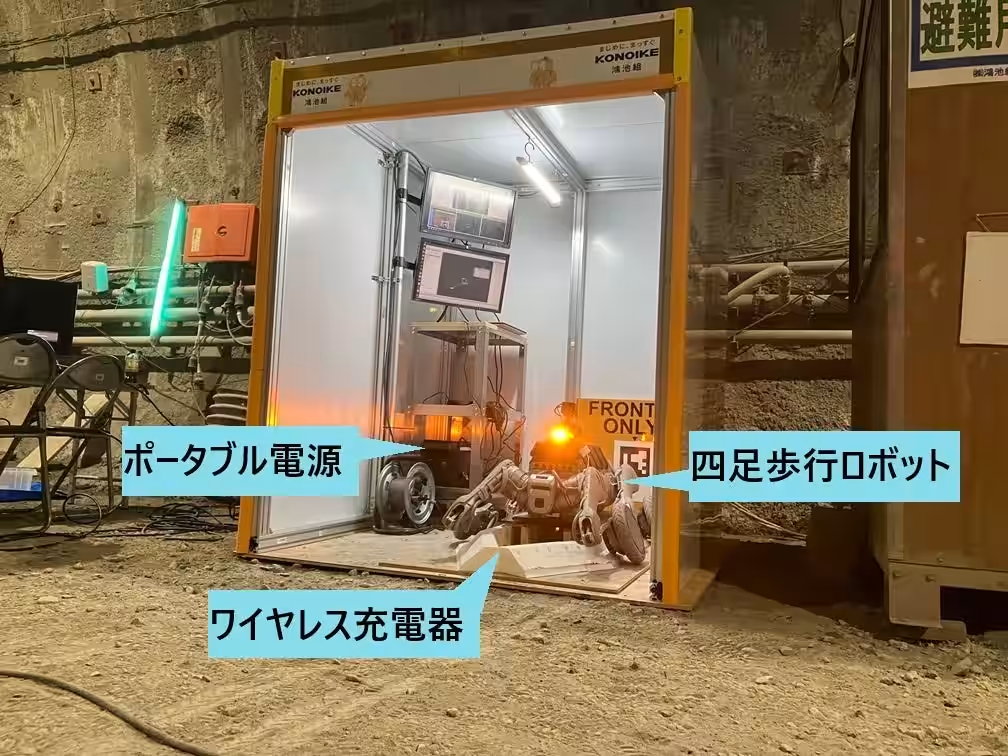
実証実験では、特定の手順に従ってロボットが観察作業を行います。まずトンネルの最深部から60m手前に設置された基地から発進し、以下のプロセスで進みます:
1. 環境スキャン:ロボットは周辺環境を三次元空間データとして記録します。
2. 自律歩行開始:解析されたデータを元に障害物を回避しながら進行。
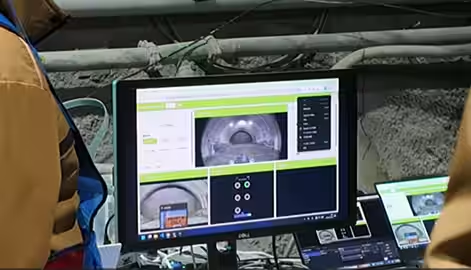
3. 観察とデータ収集:設定地点で自動停止し、掘削面を観察し、環境データを収集。
4. 帰還:収集したデータを元に元の基地へ戻ります。
発進基地には充電機能があり、観察と観測の合間にロボットを充電することで、継続的な運用を可能にしています。
先進的な搭載技術
今回の実験で使用された四足歩行ロボットは、Unitree社製のB2-Wです。このロボットは、自律歩行を実現するためにセンサーやカメラを装備し、掘削面の遠隔観察やガス検知を行います。特に、次のような機器が搭載されています:
- - 3DLiDARセンサー:空間認識と障害物検知用
- - ガスセンサー:天然ガスや有毒ガスを測定
- - ジンバルカメラ:高精度な撮影を実現
- - 無線LAN機能:遠隔操作と監視が可能
実証実験の結果
実験では、ロボットが設定された地点で停止し、掘削面の観察を行いました。これにより風化や湧水の確認、ガス検知などが遠隔にて実施され、安全にかつ高精度な情報収集が成功しました。従来の目視作業と同等の精度を保ちながら、作業員の危険を回避できるという成果が得られました。
今後の展望
今後は、より複雑な地形条件下での適用や長時間の安定運用を考慮した改良を進めていく方針です。鴻池組とポケット・クエリーズは、この取り組みにより山岳トンネル工事の安全性と効率性をさらに高めることを目指しています。
この革新技術が実現すれば、安全な作業環境の提供だけでなく、トンネル工事の効率化も期待されるでしょう。安全と精度を両立させた最新技術に、今後も注目が集まります。


関連リンク
サードペディア百科事典: 鴻池組 四足歩行ロボット ポケット・クエリーズ
トピックス(その他)








【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。