




サービスロボットの新時代、リンク式サスペンション誕生の背景とは
サービスロボットの新時代、リンク式サスペンション誕生の背景とは
近年、様々な場所での業務をサポートするサービスロボットの需要が高まっています。市民の生活の中で、飲食店や教育機関、さらには物流施設など、さまざまな業種で展開される本格的なロボット導入は、確実に進んでいます。しかし、それに伴い課題も増加しています。特に、整備されていない屋外環境で安定して稼働できるロボットの必要性が叫ばれています。
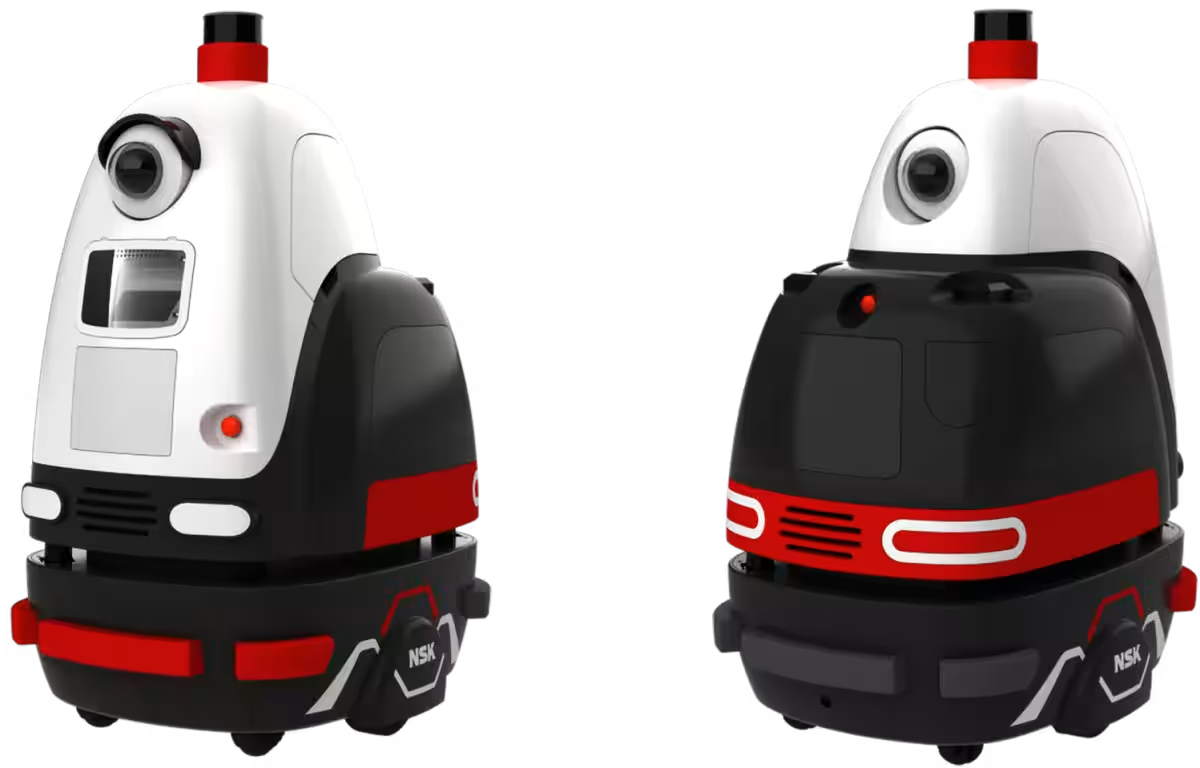
その中で注目を集めているのが、日本精工株式会社(NSK)が展開する「リンク式サスペンション」という新たな技術。この技術は、サービスロボットに必要とされる安定性を実現し、多様な走行条件に対応するために開発されました。実際に、2023年5月に発表されたプロトタイプを基に、2024年から立命館大学で開始される屋外警備ロボットの実証プロジェクトを通じて改良が加えられています。
リンク式サスペンションの功績
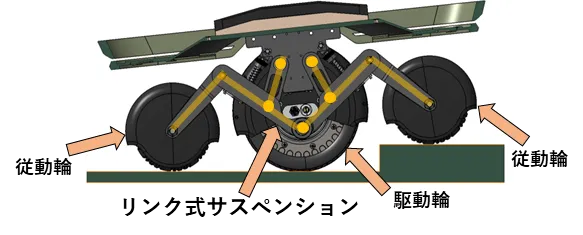
「リンク式サスペンション」は、屋外での移動を強固にサポートする能力を持つことが特徴です。このサスペンションは、駆動輪と従動輪をパンタグラフ形状のリンク機構で繋いでおり、これにより走行中に路面の凹凸や段差でも確実に地面に接触します。この技術によって、サービスロボットは不安定な環境でも直進性や機動性を保ち、必要な場所に安全に移動できるのです。NSKの代表取締役社長である市井明俊氏は、「リンク式サスペンションは、私たちの技術とノウハウを活かした革新的な取り組みです」と語っています。
実証プロジェクトの意義
この技術の実用化には、多くの試験とデータの蓄積が欠かせません。2024年には、立命館大学の大阪いばらきキャンパスで屋外警備ロボットの実証実験が開始される予定であり、これは同校との協力によって進められています。大学キャンパス内における実証実験は、国内においても先進的であり、このロボットの機能評価が行われます。
実験では、リンク式サスペンションが搭載されたロボットが、夜間の巡回でも高精度で不審者を検出できる技術も試される予定です。赤外線ライトとAI画像解析技術を結びつけることで、周囲を正確に把握し、より現実的な危機管理システムを提供します。また、GNSS(全球測位衛星システム)を使用し、ロボットの位置を常に把握することで、安全な走行を実現します。
今後の展望
NSKはこの新しいサービスロボット向けプラットフォームを、2027年内に市場に投入する計画を立てています。このプラットフォームは低床ボディとなることから、コンパクトながら多機能を備えたロボットとして、屋内外問わず多様なニーズに応えることが期待されます。
サービスロボット市場は年々拡大しており、NSKの「サービスインテグレーション」という考え方を通じて、さまざまな技術的要素を組み合わせた商品が求められています。もしこのリンク式サスペンションが実用化されれば、これまでのロボットの可能性を大いに広げることができるでしょう。
NSKのビジョン
日本精工株式会社は、1916年に日本で初めてベアリングを生産して以来、100年以上にわたり革新的な技術を生み出しています。その企業理念は、「MOTION & CONTROL™」を通じて安全で円滑な社会に貢献することです。これからの展望として、NSKは「新しい動きをつくる」ことを目指し、技術の革新を続けていく考えです。
このように、リンク式サスペンション技術の進歩は、いかにしてサービスロボットの実用化を進めるのか、期待が高まります。今後もNSKの取り組みに注目していきたいですね。







関連リンク
サードペディア百科事典: リンク式サスペンション サービスロボット 日本精工
トピックス(エンタメ)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。